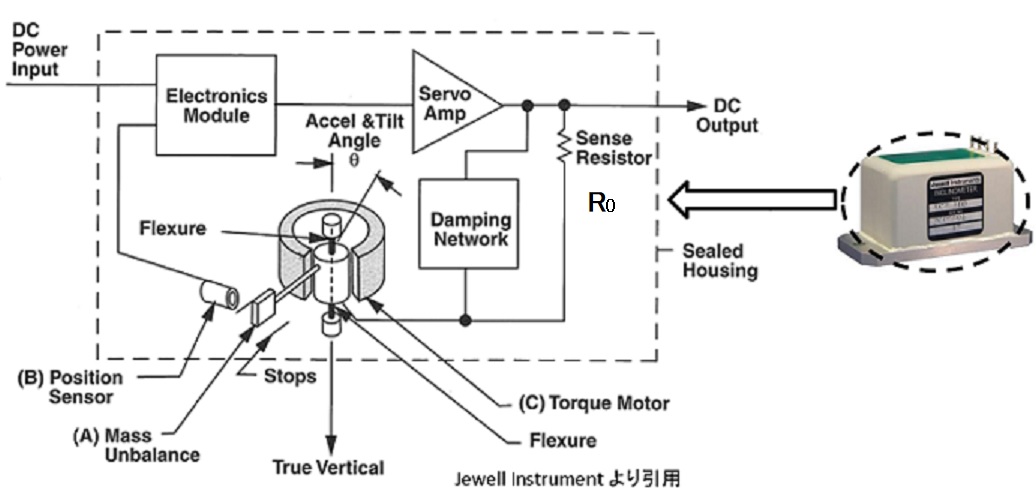
サーボ傾斜角形の動作原理の1つを紹介します。
上記、動作原理図の構成、トルカとその可動コイルに取り付けられた振子端子、
振子置検出器、サーボアンプ、制御回路などから構成されております。
振子の角変位を振子位置検出器が検出し、電気信号に変換します。
サーボアンプは、この電気信号を増幅し、トロイカコイルに帰還電流を流してトルクを発生させ、
これにより、振子は元の位置に戻されます。
振子に作用する重力とトルカによる電磁力が平衡しているので、サーボアンプの出力はSinθに比例することになります。
原理図では、この電流を固定抵抗R0に流すことにより、電圧出力が得られます。
傾斜角センサについてはこちら▼
https://www.sankyointernational.co.jp/products/sensor/tilt_snsr
お問い合わせはこちら▼
https://www.sankyointernational.co.jp/contact.html